


智能电气阀门定位器在实际中的应用
作者:三精阀门 来源:三精阀门 2009-05-20 浏览量:539
字号:T | T
电气阀门定位器是气动调节阀的关键附件之一,其作用是把调节装置输出的电信号变成驱动调节阀动作的气信号。它具有阀门定位功能,既克服阀杆摩擦力,又可以克服因介质压力变化而引起的不平衡力,从而能够使阀门快速的
电气阀门定位器是气动调节阀的关键附件之一,其作用是把调节装置输出的电信号变成驱动调节阀动作的气信号。它具有阀门定位功能,既克服阀杆摩擦力,又可以克服因介质压力变化而引起的不平衡力,从而能够使阀门快速的跟随,并对应于调节器输出的控制信号,实现调节阀快速定位,提升其调节品质。随着智能仪表技术的发展,微电子技术广泛应用在传统仪表中,大大提高了仪表的功能与性能。其在电气阀门定位器中的应用使智能定位器的性能和功能有了一个大的飞跃。
二、智能电气阀门定位器与传统定位器的对比
2.1 传统电气阀门定位器的工作原理
电气阀门定位器经过几十年的发展,各公司产品虽不尽相同,但基本原理大致相似,下面画简图进行说明。其基本结构见图1:
二、智能电气阀门定位器与传统定位器的对比
2.1 传统电气阀门定位器的工作原理
电气阀门定位器经过几十年的发展,各公司产品虽不尽相同,但基本原理大致相似,下面画简图进行说明。其基本结构见图1:
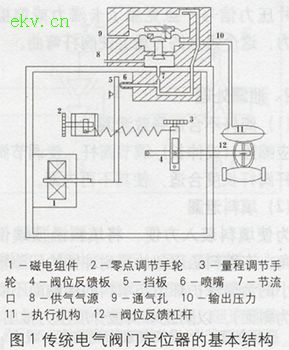
反馈杆反馈阀门的开度位置发生变化,当输入信号产生的电磁力矩与定位器的反馈系统产生的力矩相等,定位器力平衡系统处于平衡状态,定位器处于稳定状态,此时输入信号与阀位成对应比例关系。当输入信号变化或介质流体作用力等发生变化时,力平衡系统的平衡状态被打破,磁电组件的作用力与因阀杆位置变化引起的反馈回路产生的作用力就处于不平衡状态,由于喷嘴和挡板作用,使定位器气源输出压力发生变化,执行机构气室压力的变化推动执行机构运动,使阀杆定位到新位置,重新与输入信号相对应,达到新的平衡状态。 在使用中改变定位器的反馈杆的结构(如凸轮曲线),可以改变调节阀的正、反作用,流量特性等,实现对调节阀性能的提升。
2.2 智能电气阀门定位器工作原理
虽然智能电气阀门定位器与传统定位器从控制规律上基本相同,都是将输入信号与位置反馈进行比较后对输出压力信号进行调节。但在执行元件上智能定位器和传统定位器完全不同,也就是工作方式上二者完全不同。智能定位器以微处理器为核心,利用了新型的压电阀代替传统定位器中的喷嘴、挡板调压系统来实现对输出压力的调节。 目前有很多厂家生产智能型电气阀门定位器,西门子公司的SIPATT PS2系列智能电气阀门定位器比较典型,具有一定代表性,下面以就以SIPART PS2系列定位器为例,对智能定位器的工作原理进行说明,其基本结构如图2所示: